Gallery
× ![]()
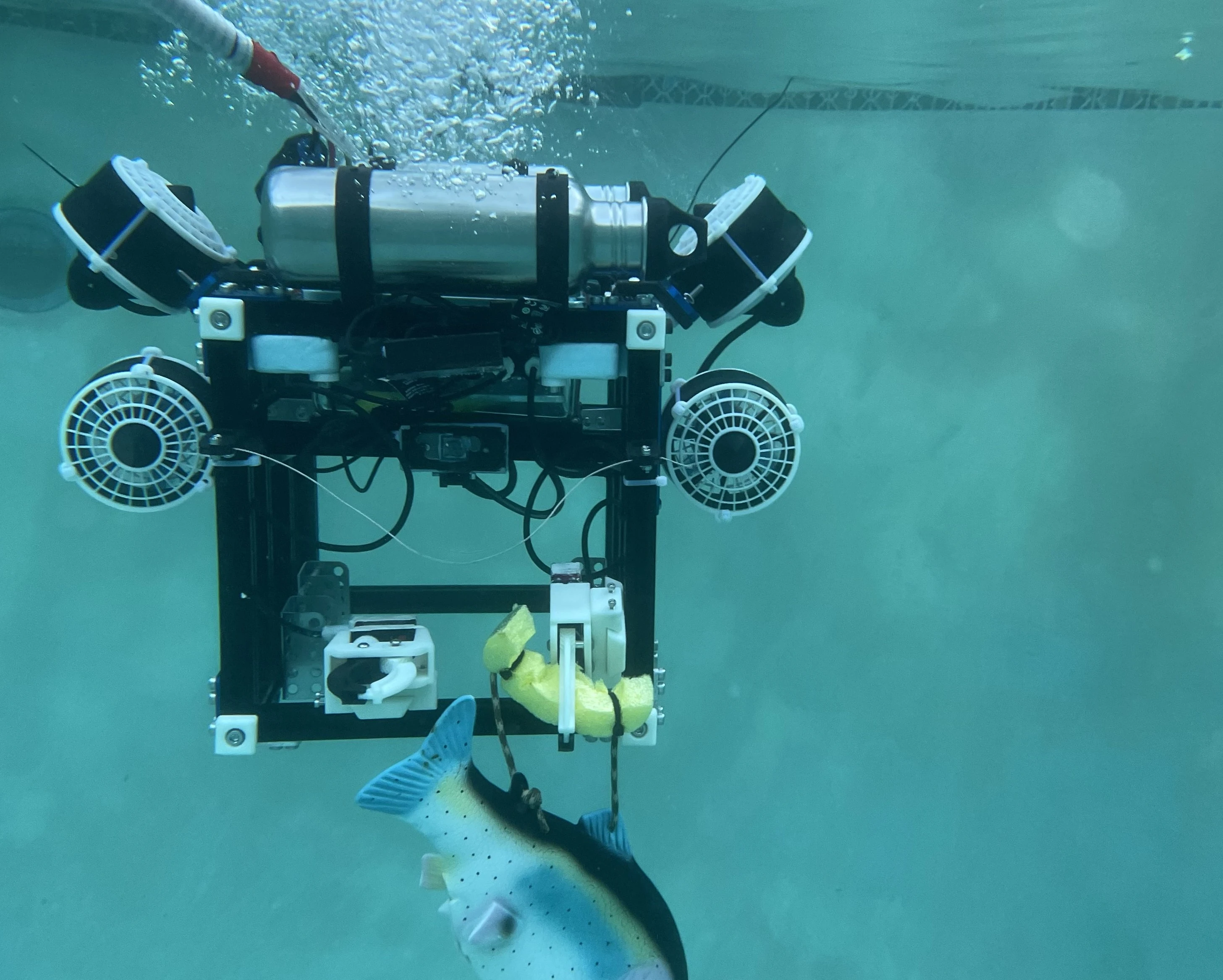
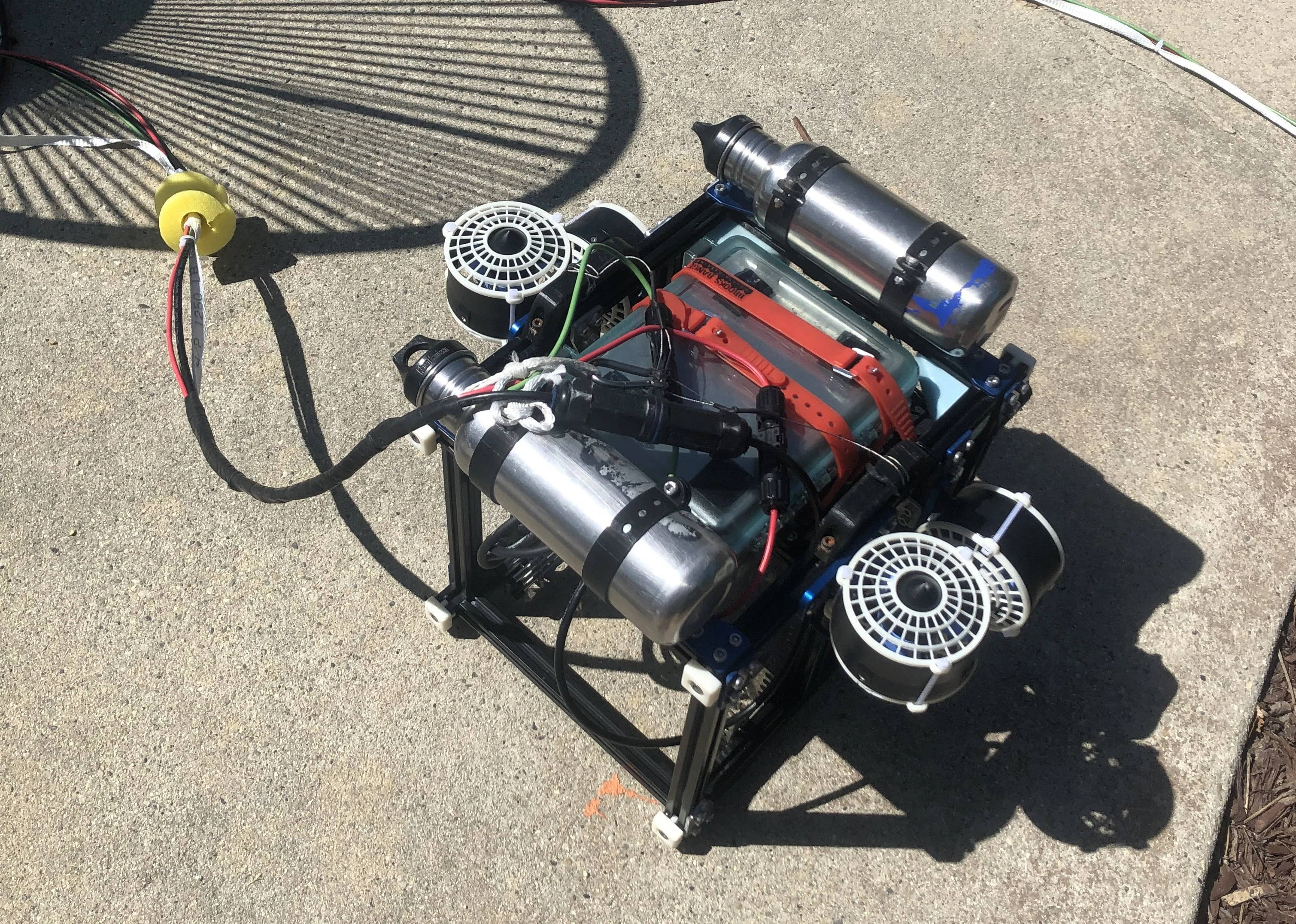
Hydrozoa was the first generation ROV developed by the Cabrillo Robotics Club. Due to extremely limited time and funds, we prioritized simplicity and made heavy use of reused or off-the-shelf parts. The vehicle had 4.5 degrees of freedom and used servo-actuated claws.
All the electronics were housed in an off-the-shelf Tupperware container, which led to thermal issues due to poor heat transfer between the container and the water. This forced us to trim our power budget even further. To save time and money, the thrusters and servos were driven by software-generated PWM, which caused significant jitter and unpredictable behavior.
Hydrozoa ran on the ROS1 framework, but we encountered a major software challenge—there was no image compression, limiting us to only two active camera feeds out of the three onboard. Despite being a makeshift vehicle, we were proud of its performance, considering the tight time constraints and limited resources we had to work with.