Gallery









× ![]()
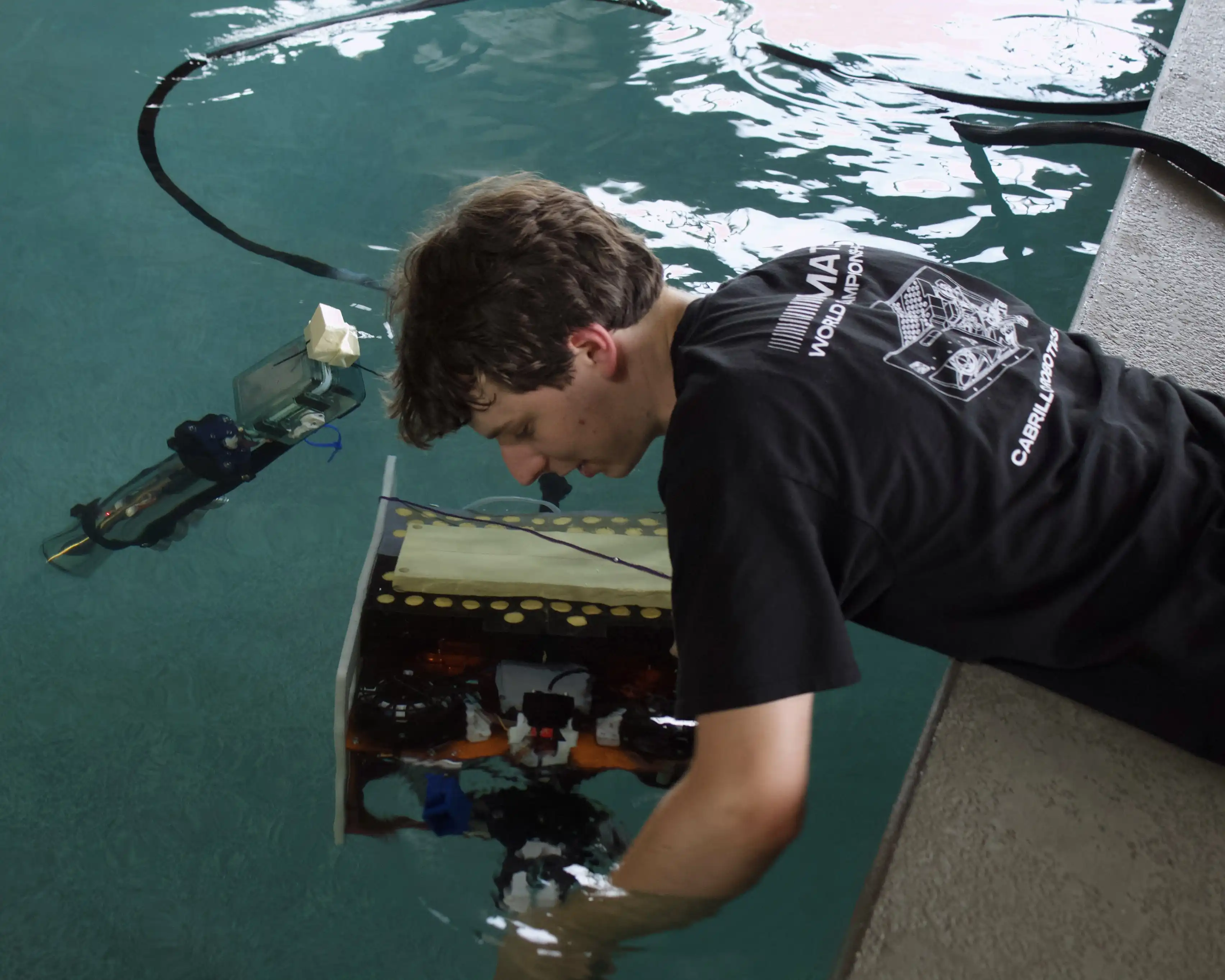
The SeaHawk II is our third-generation ROV, engineered for the 2024 MATE ROV Competition. This ROV was completely redesigned from scratch, with no iterations from the SeaHawk (2023). However, we learned many valuable lessons from previous generations, which informed our strict design constraints and contributed to the robust and successful SeaHawk II.
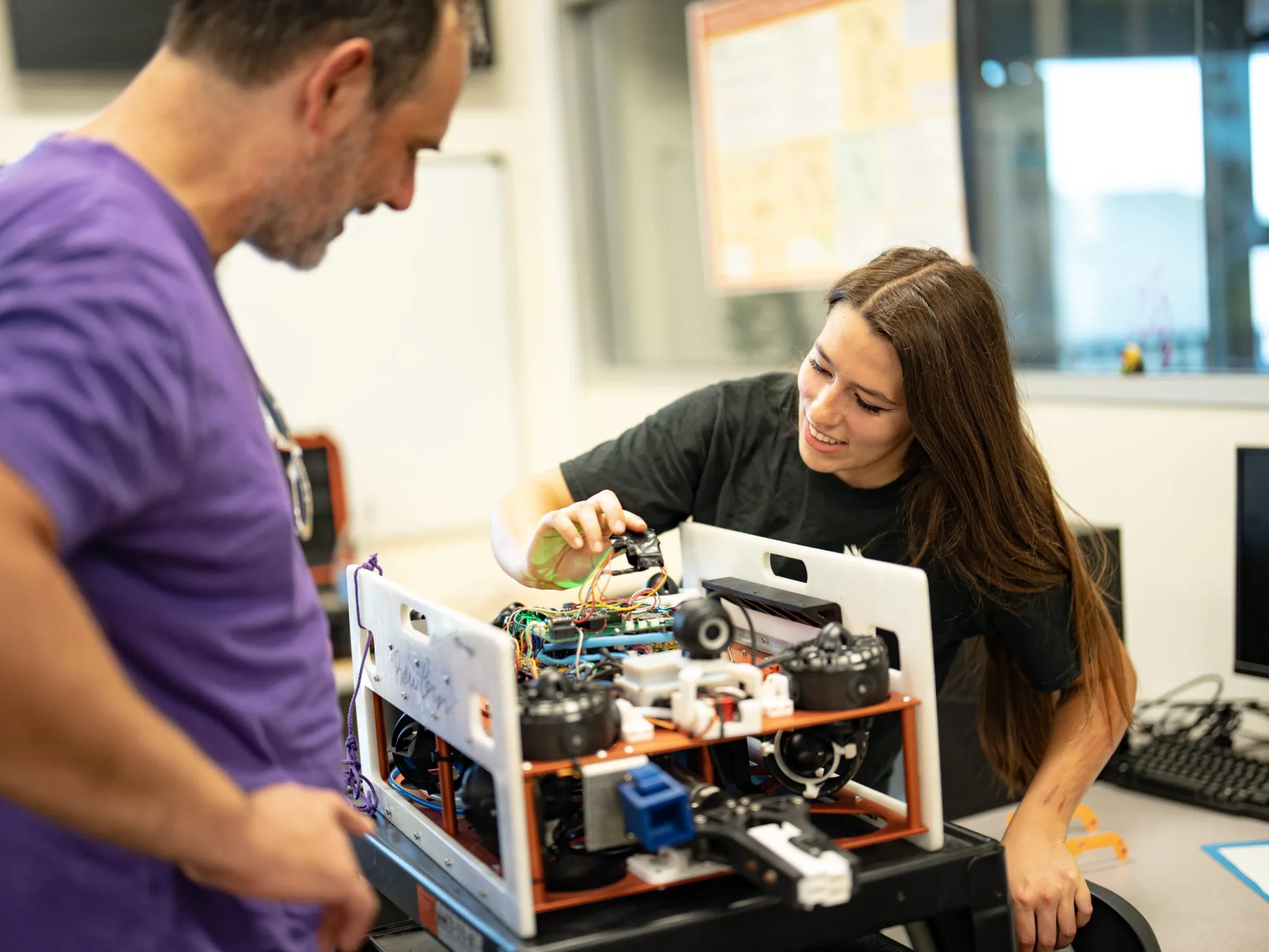
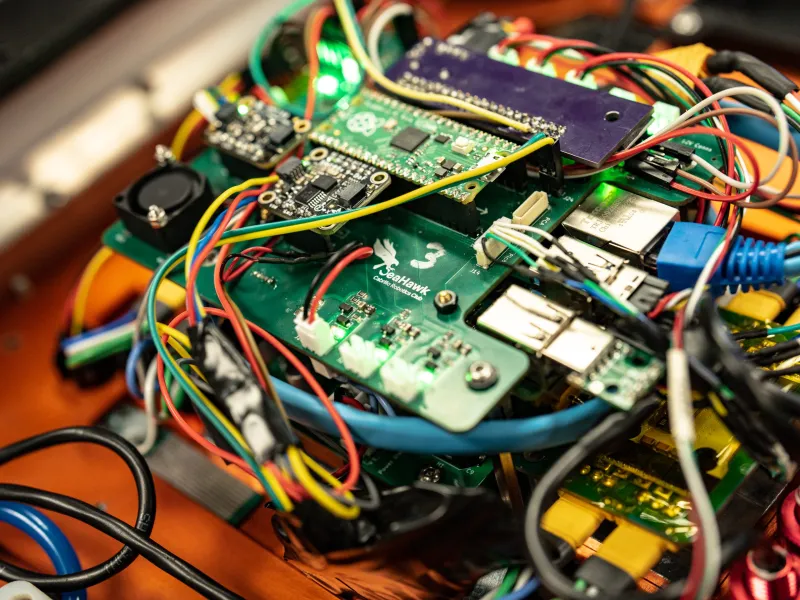
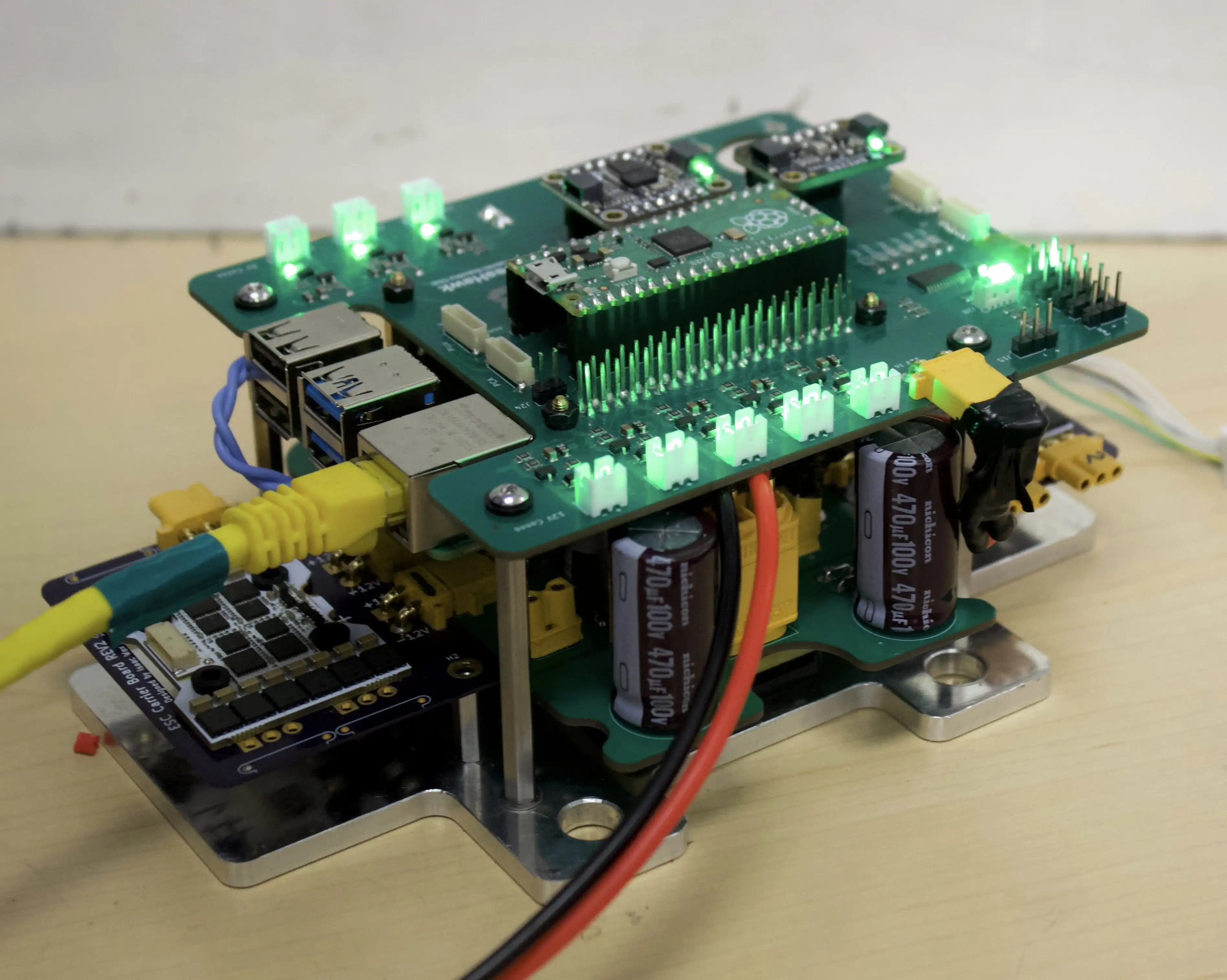
With a clear understanding of our design requirements, we transitioned from our previous research frame to a frame made from sheet-cut aluminum. This change greatly improved the mechanical reliability of the ROV and allowed us to reduce weight. Additionally, we moved away from off-the-shelf pressure vessels and machined our own electrical box out of aluminum. We designed a stack of custom PCBs, significantly enhancing reliability and performance compared to last year. We also dedicated considerable time to developing our tooling systems, including the main claw, rock scraper, and quick-release tooling system.
Like its predecessor, SeaHawk II’s software is based on the Robot Operating System (ROS). ROS provides tools and software libraries specialized for development of robotics applications. While we continued using ROS, the software evolved significantly. We planned on a light refactor but ended up doing a near-complete rewrite of last year’s software. Major changes included a custom dashboard, a reliable data-driven kinematics system, and micro-ROS for integrating a Raspberry Pi Pico. The control system consists of a surface pilot interface as well as an onboard Raspberry Pi 4 (a single-board computer) and a Pi Pico (a microcontroller). Pilot inputs from an Xbox controller and keyboard are read, interpreted, then sent to the onboard Pi. PWM drivers on the Pico drive the motors. To enhance the piloting experience and ease of use, a variety of feedback including camera displays and sensor readings are displayed by the completely custom dashboard graphical user interface. All software for this project is open source and can be found on our GitHub.
SeaHawk II is equipped with a suite of safety features that reduce the risk of injury and provide streamlined operation. To protect ROV operators and the marine environment, all tooling edges are chamfered and thrusters are enclosed in custom 3D-printed thruster shrouds that block objects larger than 12 mm. The 24m tether is equipped with a master fuse and strain relief webbing. An overvoltage protection circuit prevents damage to electronics in the event of a voltage spike. Various tooling is powered by pneumatics (pressurized air) which can cause severe injury if not safely implemented. For this reason, the air prep system valve purges potentially dangerous pressure build-up, and operators must be familiar with the dangers and correct usage of pneumatic power. Advanced software limits thruster power and monitors the system and sensors for abnormalities in which case the pilot is notified and prompted to use the kill switch for immediate shutdown.