Chassis
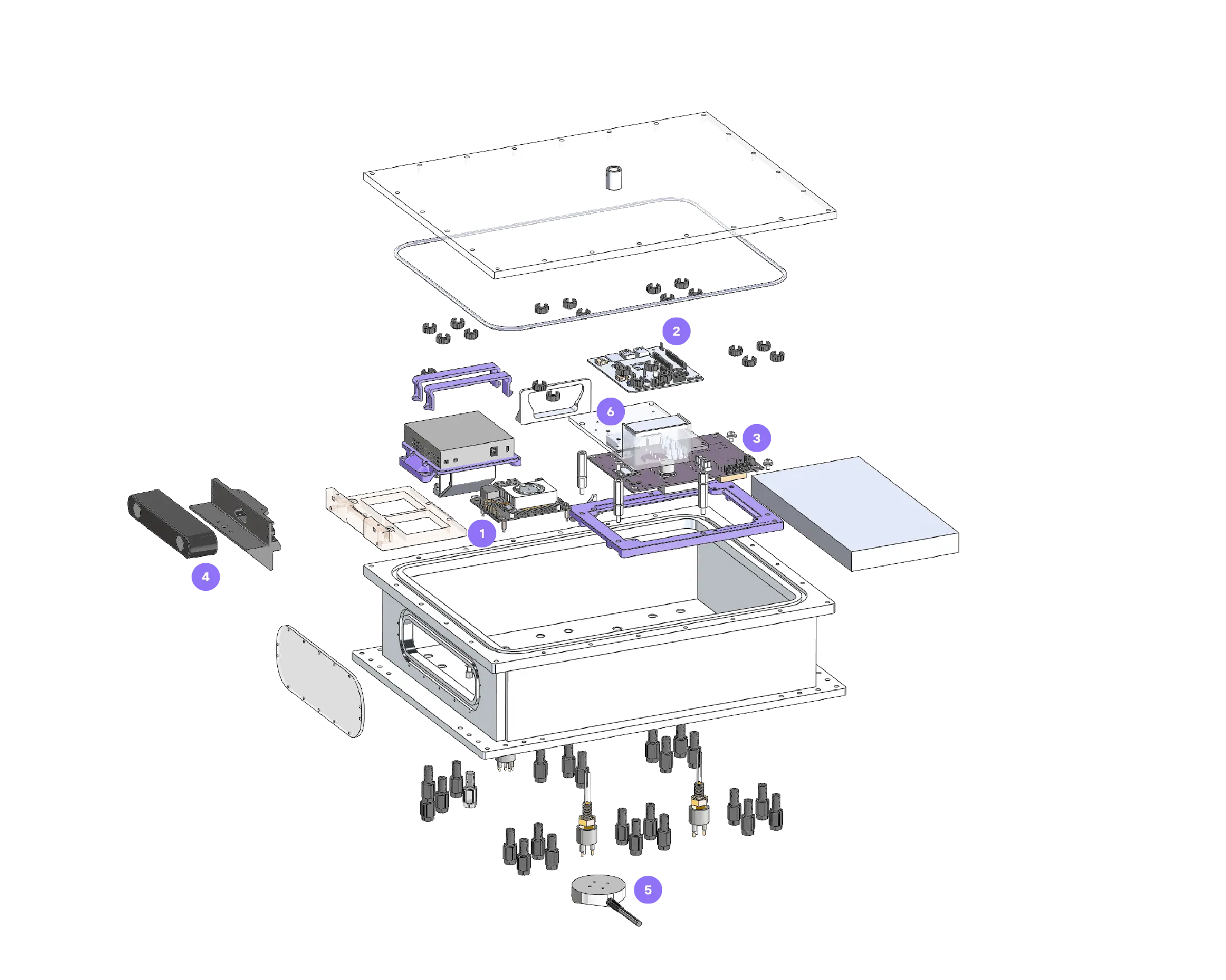
The mechanical design prioritizes modularity and expandability. These qualities, along with rapid development cycles, were favored over producing a polished final product due to the limited team size and time constraints.
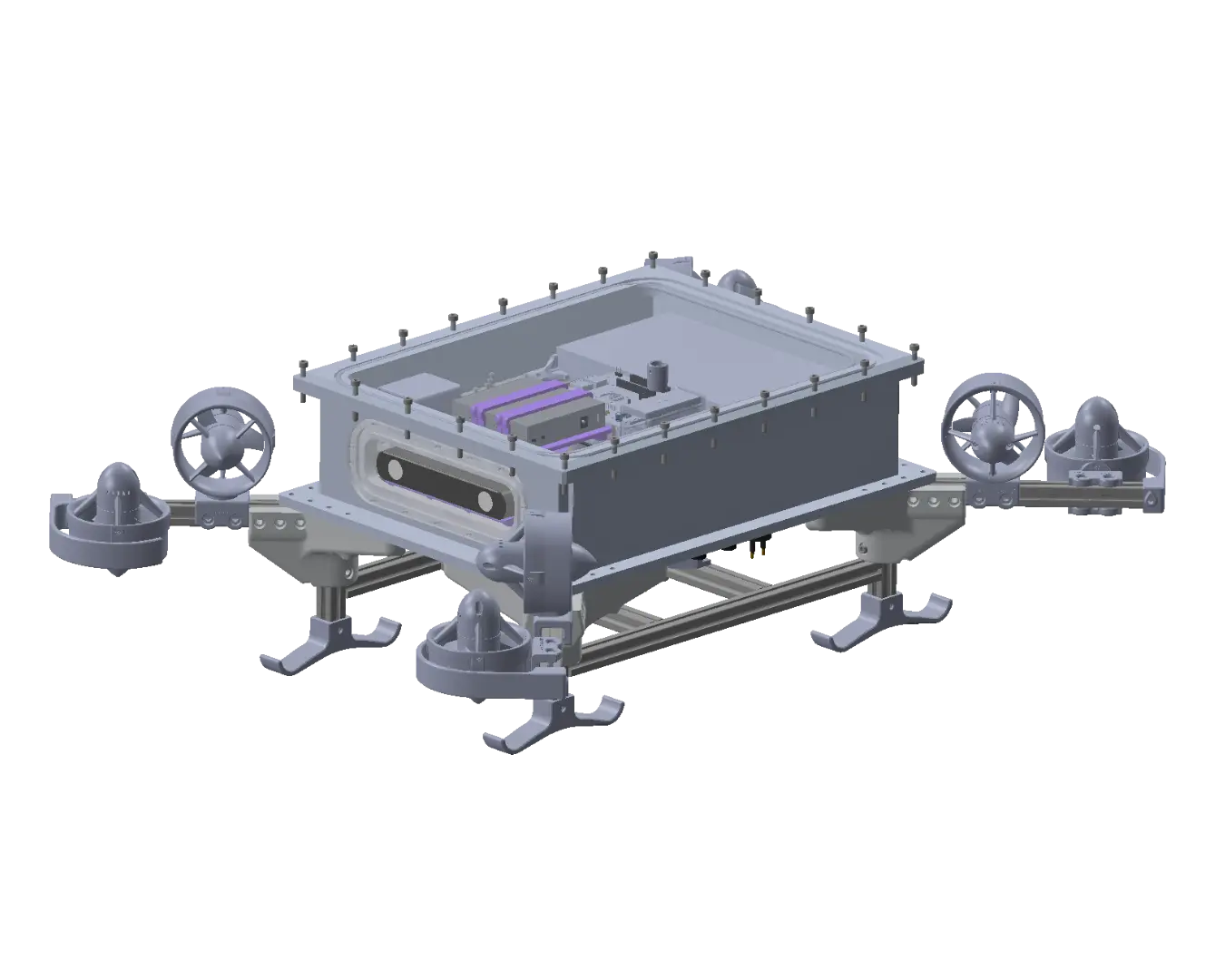
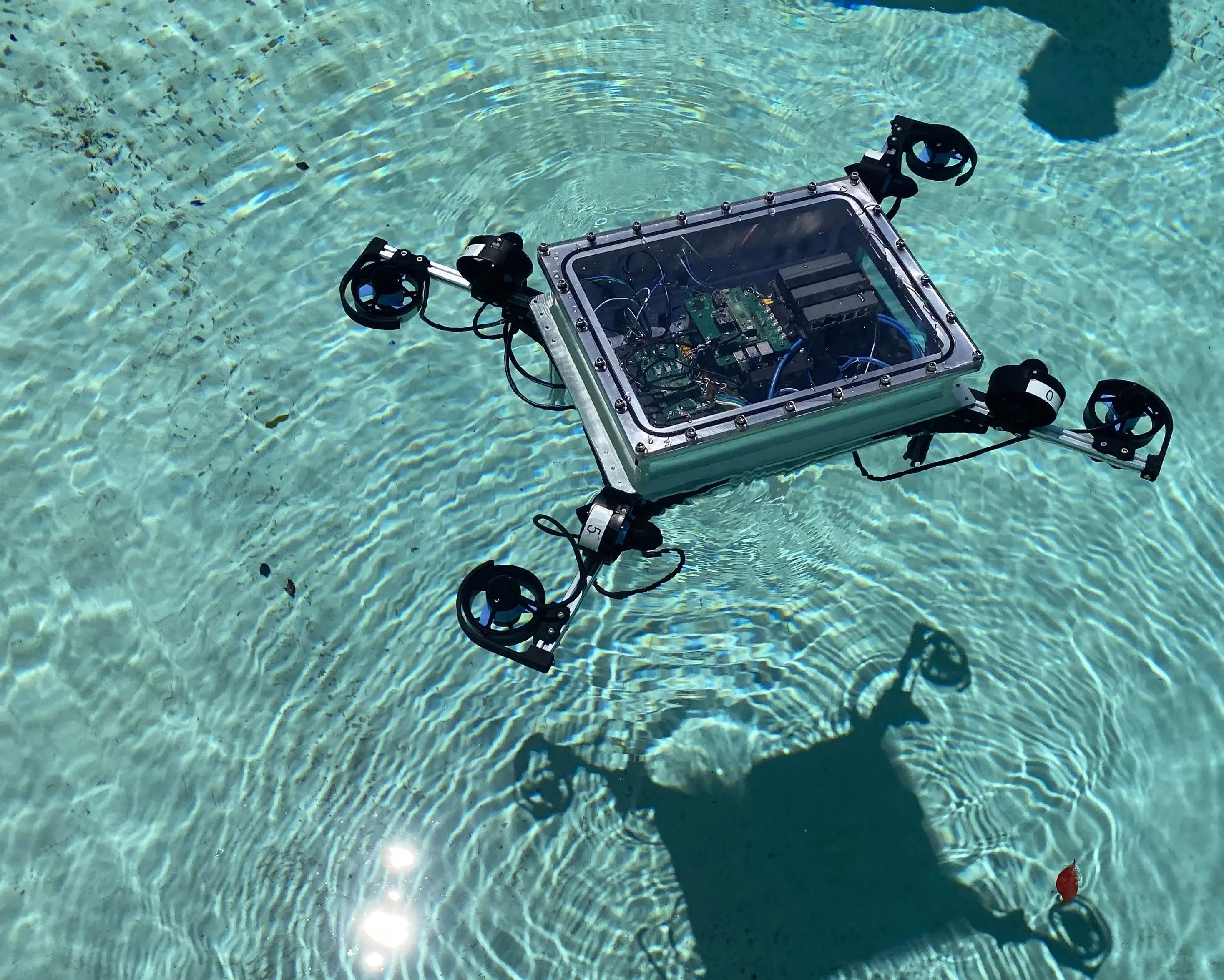
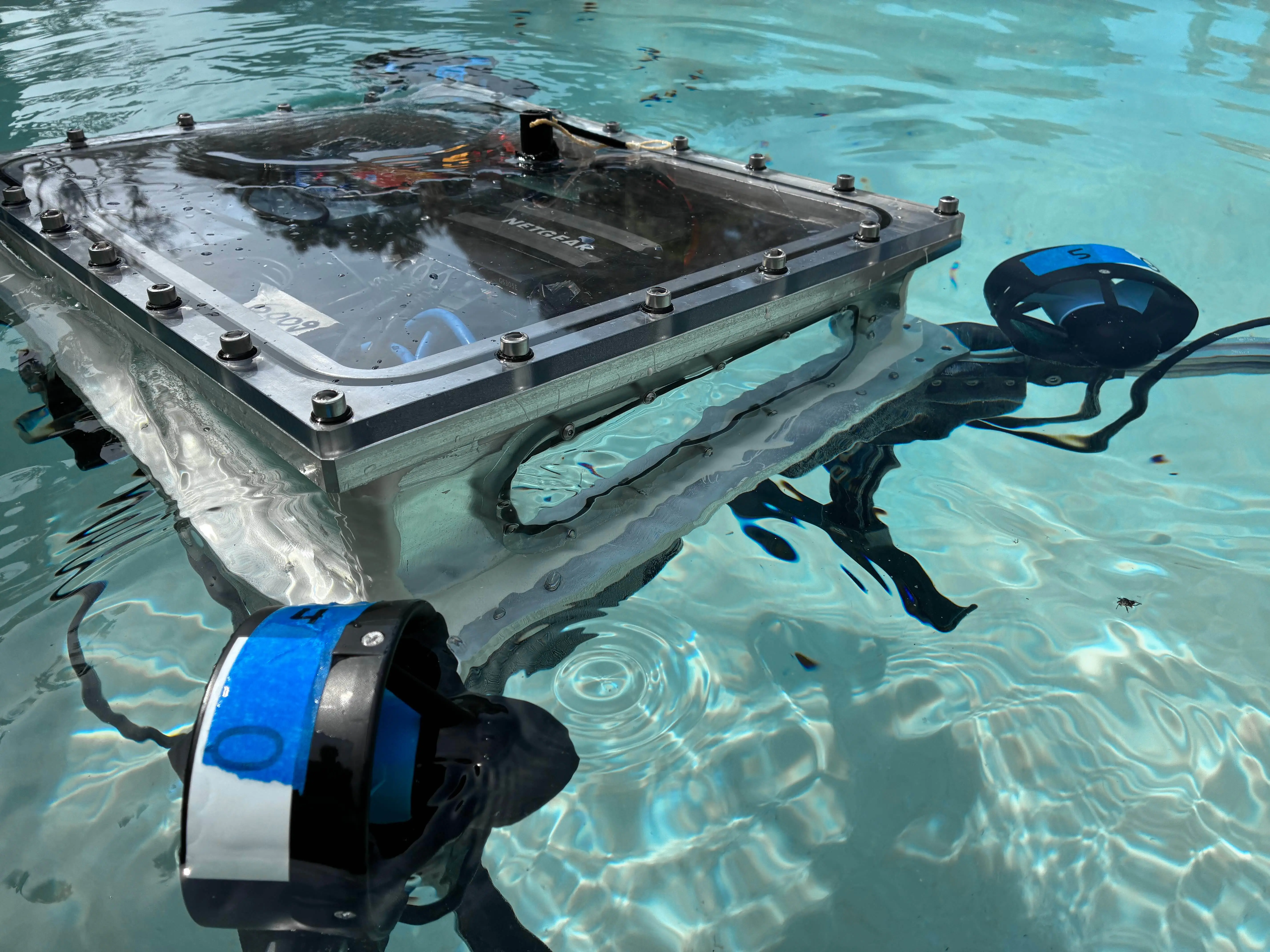
The vehicle chassis consists of two main components: the electrical and thruster extrusions. The thruster extrusions are secured to the electrical enclosure using four FDM-printed mounting brackets. The chassis provides mounting points for the thrusters, tooling, and a protected location for the DVL.
LazerShark's weight is balanced by the buoyancy of the electrical box's volume. For fine buoyancy tuning, FDM-printed cartridges filled with lead shot can be added to or removed from unused interior spaces in the electrical box.